假设对观测数据进行拟合,得到的拟合曲线为。将观测数据
代入
,得到
,其和
的偏差定义为
(1)
评价拟合结果好坏的函数称为指标函数
(2)
拟合函数在观测数据上总的偏差越小,说明拟合的越好,因此
可以具体写成
(3)
其中,
是加权系数,表示每个观测数据的重要程度。一般情况下,我们认为每个观测数据是等重要的。因此,上式可以简化为
(4)
其中偏差可以定义为
(5)
当p=0时,
当p=1时,
当p=2时,
。。。
评价函数一般写成p范数的p次方
(6)
求最优拟合函数的过程是在
和
构成的空间上寻优的过程
(7)
对应的解是
(8)
指标函数是一个以函数为自变量的函数。至此,这个问题是变分问题(至于说如何使用变分来求解,暂且压一压,以后再细说)。
假设拟合函数为。
,
,
。
如何求出呢?,从p=2开始推导。
评价函数对求导(因为在
的取值范围是连续的,且向量的
是一个凸函数,至少是不凹的),
(9)
(10)
当时,
,因此极值点为极小值点。
等价于
(11)
上式两边进行转置,得
(12)
X为列满秩矩阵,的逆矩阵存在。因此
(13)
(14)
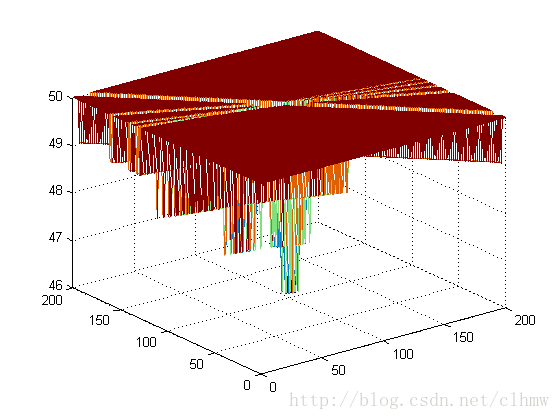
当p=0时,。该式表示,拟合直线穿过观测数据点越多越好。该方法对数据的分布以及其中掺杂的噪声比较敏感,解不稳定。该方法可能不能拟合出真实数据的曲线,而是拟合了噪声数据。
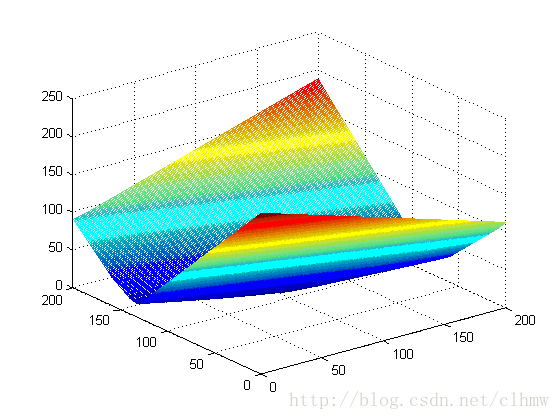
当p=1时,。评价函数导数不连续,求解不像二范数求解那么方便,因此很少使用,但在有些情况下,1范数拟合的曲线更好。
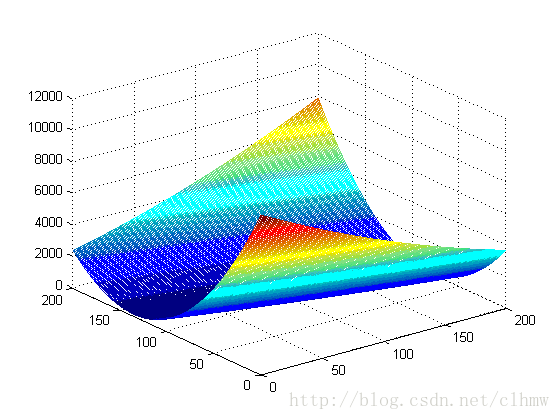
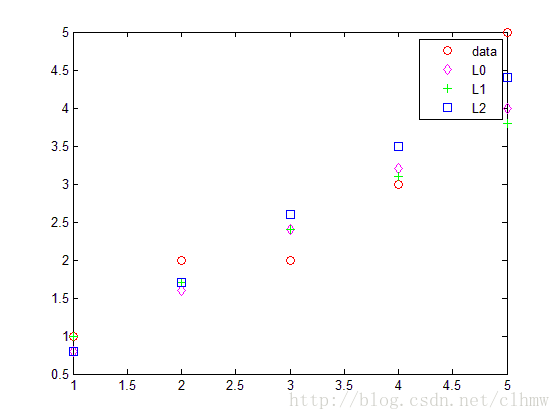
下面用一段代码,简单说明一下p范数对拟合结果的影响
lens=50;b=50; x=1:lens;y=2*x+b*randn(1,lens); x=[1 2 3 4 5];y=[1 2 2 3 5]; for k=1:200 for b=1:200 yk=(k-100)/10*x+(b-100)/10; d=y-yk; sign=ones(1,lens); sign(find(abs(d)<0.5))=0; err0(k,b)=sum(sign); err1(k,b)=sum(abs(d)); err2(k,b)=sum(d.*d); endendfigure(1)mesh(err0)figure(2)mesh(err1)figure(3)mesh(err2) figure(4)plot(x,y,'ro')hold on [a1 a2]=min(err0);[b1 b2]=min(a1);ka0=(a2(b2)-100)/10;ba0=(b2-100)/10;yk0=ka0*x+ba0;plot(x,yk0,'md') [a1 a2]=min(err1);[b1 b2]=min(a1);ka1=(a2(b2)-100)/10;ba1=(b2-100)/10;yk1=ka1*x+ba1;plot(x,yk1,'g+') [a1 a2]=min(err2);[b1 b2]=min(a1);ka2=(a2(b2)-100)/10;ba2=(b2-100)/10;yk2=ka2*x+ba2;plot(x,yk2,'bs') e10=sum(abs(y-yk0))e11=sum(abs(y-yk1))e12=sum(abs(y-yk2)) e20=sum((y-yk0).*(y-yk0))e21=sum((y-yk1).*(y-yk1))e22=sum((y-yk2).*(y-yk2)) legend('data','L0','L1','L2')hold off
这段代码首先生成一组数据(x,y),然后分别使用0、1和2范数进行拟合求解。搜索范围k=[-10,10],b=[-10,10]。在搜索空间中找到拟合误差最小的最小p乘解。
从评价函数的2范数出发,的解的形式中包含着复杂的矩阵运算关系,这其中应该蕴含着什么。让我们首先从一个简单的例子入手吧。
有a,b两个向量,b在a上的投影p可以写成投影长度x和a方向上单位向量的乘积
(15)
往a方向上做投影的投影变换矩阵为
(16)
(17)
向量b到向量a的距离等于e=b-p的模,垂直方向上的投影矩阵为
(18)
(19)
在数据拟合中,数据的个数远远多于未知数(待求解参数)的个数,因此这个方程不能得到精确解。我们需要找到距离Y最近的一个空间,将Y投影到该空间中。X的列向量构成的空间叫做列空间。该空间内的任意向量Xv都是X的列向量的线性组合得到,v就是组合系数。Y的近似解形如
(20)
近似解与Y之间的向量为
(21)
该向量垂直于X的列空间中的任意向量Xv,有
(22)
(23)
因为v为任意向量,因此
(24)
(20)式两边同时左乘矩阵X的转置,将(24)式代入得到
(25)
解出
(26)
近似解
(27)
Y在投影变换矩阵的作用下,投影到X的列空间上,投影后得到的向量为
,误差向量
,误差的大小为
。
投影矩阵从另外一个角度解释了最小二乘法,同时也是最小p(p>2)乘法的解释。我们发现,最小二乘法给出的解是近似解。误差的来源方方面面,比如系统偏差,观测误差,记录误差等等。这些因素之间是一个什么样的关系,线性的还是非线性的,一时半会儿说不清楚,我们偷个懒,将拟合问题重新形式化如下
(28)
我们要求的问题等价于
(29)
搞工程的搞来搞去不经意的发现,当随机不可知的因素很多,独立随机试验的次数很大时,由这些随机因素造成的随机误差服从高斯分布。学术界的人按耐不住了,不能让搞工程的压下去,整出了一个中心极限定理,各种分布都会渐进服从高斯分布。
我们俗气一把,还是从高斯分布入手,假设误差 服从零均值高斯分布,即。为什么是零均值,因为我们不想估计出个没用的有偏的分布出来。这种零均值误差还有个很带感的名字,白噪声。对其进行傅里叶变换后,各个频率都有响应,也就是说这种噪声是由不同频率的噪声合成的。我们常见的由各个频率合成的事物就是白色的光。所以,按照国际惯例,这种噪声叫做白噪声。
另外一个假设是独立同分布,也就是每次实验都是独立的,但是服从的分布相同。
(30)
(31)
令上式对的导数为零,又见
。也就是说,最小二乘法的概率解释是,拟合误差服从零均值高斯分布,拟合直线通过均值点。
假设噪声服从形如,那么其解对应的就是最小p范数解。这种分布貌似就是指数族分布,当p=1时叫做拉普拉斯分布,p=2时就是大名鼎鼎的高斯分布。
通过上面的分析,我们可以察觉到,噪声的模型影响了最终的拟合结果。如果噪声是形如1范数的,那么用2范数的最小二乘法拟合出来的直线就存在偏差。如果噪声中有粗大误差,那么如果不能事先去除,拟合的结果很有可能拟合了噪声而没能拟合真实数据。从这个角度看,其实我们能够解决的问题还比较有限,因为我们对于噪声的认识还不够。
从p范数的角度出发,均值是误差形如2范数的解,中位数是误差形如1范数的解,众数是误差形如0范数的解。猜想,p阶矩就是误差形如p范数的解。
到这里,我丧心病狂的把凸优化,线性代数和概率论貌似完美的在数据拟合的框架下联系在了一起。从其反方向看,这些理论本来就是为了解决数据拟合而被提出来的。只是数学教学时,人为的把本来应该在一起的拆开了。
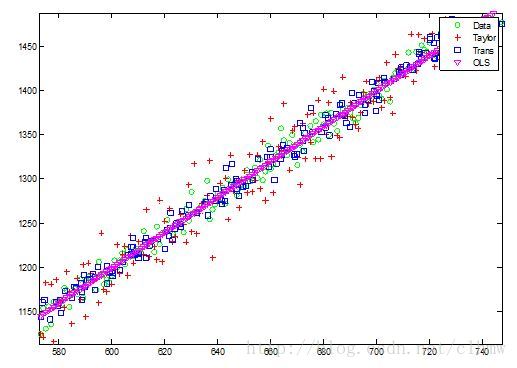
图中的数据在y=2x上加入了标准差为10的零均值高斯白噪声。使用上面推导的公式解出拟合曲线为
拟合误差的样本均值为0.abc%#%$^#e-13,样本标准差为9.44。同时,该拟合曲线通过样本的均值点 。
a=4;b=10;lens=100; x=1:lens;y=zeros(1,lens);y=2*x+b*randn(1,lens); X=[x;y]'; Y0=zeros(lens,2);Y1=zeros(lens,2);Y2=zeros(lens,2);Y3=zeros(lens,2);pY=zeros(lens+10,2); A=zeros(lens,4);V=zeros(lens,4);D=zeros(lens,4);pY1=zeros(lens+10,2); figurefor i=1:lens Y0(i,:)=X(i,:); if i>3 && a>=4 Y3(i,:)=Y0(i,:)-3*Y0(i-1,:)+3*Y0(i-2,:)-Y0(i-3,:); end if i>2 && a>=3 Y2(i,:)=Y0(i,:)-2*Y0(i-1,:)+Y0(i-2,:); end if i>1 && a>=2 Y1(i,:)=Y0(i,:)-Y0(i-1,:); end pY(i+1,:)=Y0(i,:)+Y1(i,:)+0.5*Y2(i,:)+1/6*Y3(i,:); if i
上面的代码中pY是基于泰勒级数展开的近似估计,pY1是基于局部最小二乘估计,pY2是全局最小二乘估计。
说了这么多,我们原地踏步在一阶线性估计上,高阶怎么求解。改改X和就可以了。求解方法还是原来的配方,还是原来的味道。这里就不在多啰嗦了。
(32)
(33)
给大家再拜上一记大杀器
(34)
小伙伴们不要害怕,看一副卖萌的样子就知道这货是传说中的核函数。加权函数一块来的时候,更加凶残的公式也就来了
(35)
从数据出发,我们总能对它们进行合适的解释,发现合适的模型,拟合出合适的曲线,并给出这种解释的好坏程度。到目前为止,我们对于数据拟合能够给出的最简洁的表达是
(36)
貌似我们可以满足的洗洗睡了,但是一个关键的问题是X的具体形式能不能由数据自己说出来,也就是说从无到有可不可能。此外,还有两个问题没有解决,如何在保证上式成立的同时将参数的空间最小化,也就说能够用线性拟合的不用二阶多项式拟合。第二个问题就是迭代拟合。现实情况中,我们接收到的数据往往是以时间序列的形式呈现的,那t时刻和t-1时刻的模型出现不一致时,怎么处理。
未完待续